3D narrow-azimuth limited-offset streamer survey
The survey is a narrow-azimuth marine streamer acquisition with 8 receiver cables of length 5.5 km. There are 5186 shots in total in the test area with one fifth randomly selected per iteration of the XWITM algorithm.
The raw shot gathers that are input into the inversion have all free-surface effects retained. No pre-processing is applied to the traces beyond bandpass filtering for progressively widening the frequency range through blocks of iterations.
Key objectives:
- use advanced cost functions to reliably avoid cycle-skipped minima and robustly converge from multiple very distant starting points
- update the macro-model with reflections down to the target layer below the BCU where the closure is filled with multiple trillion cubic feet of gas in place
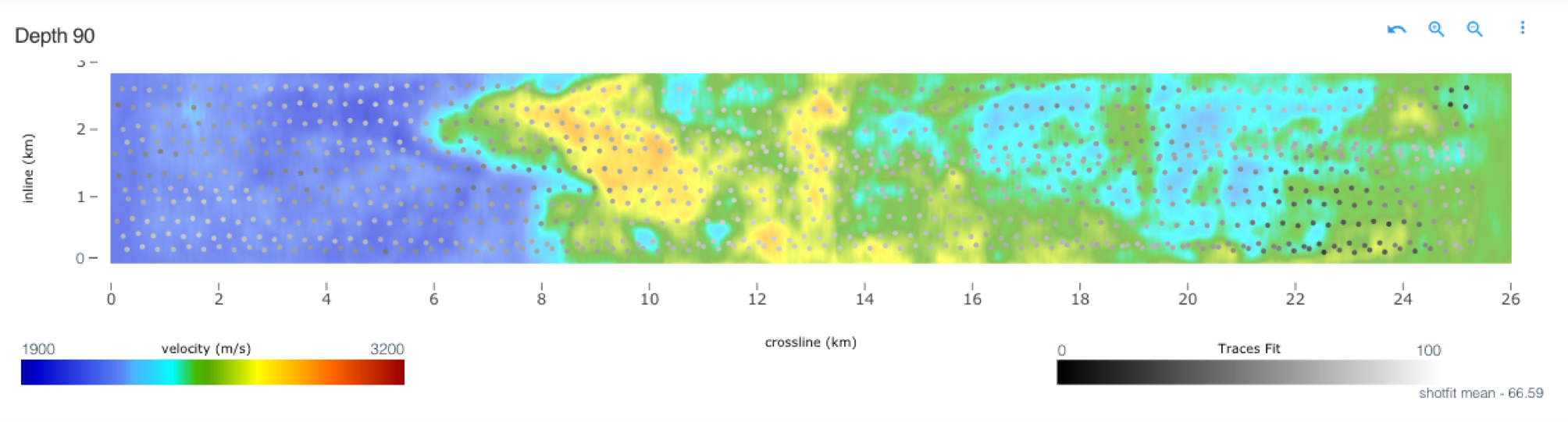
Single receiver cable from survey
Filtered 3-20Hz
Overcoming the local minima traps
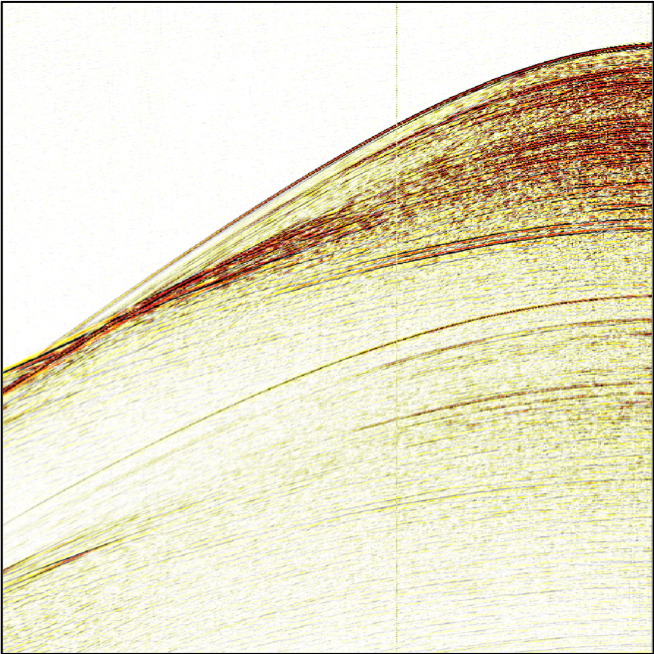
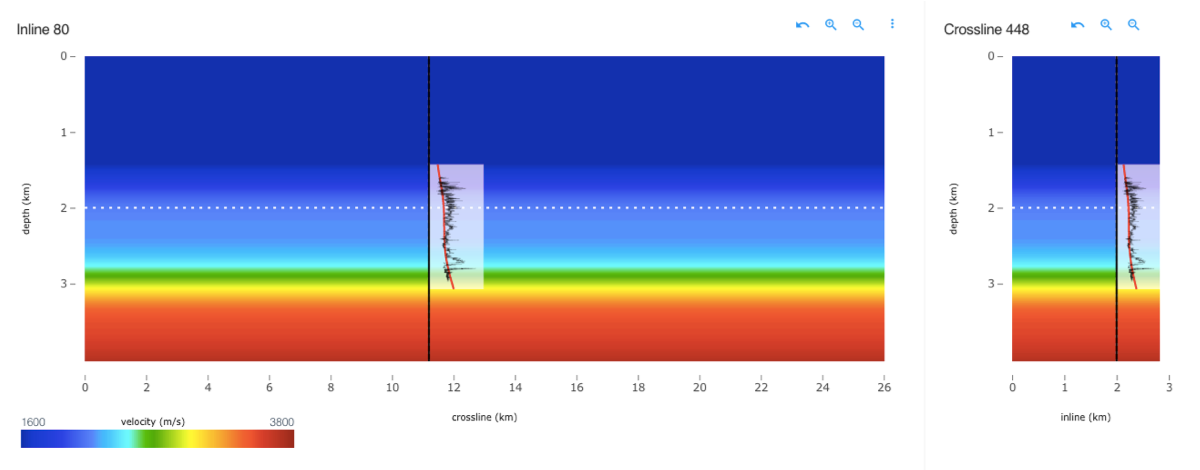
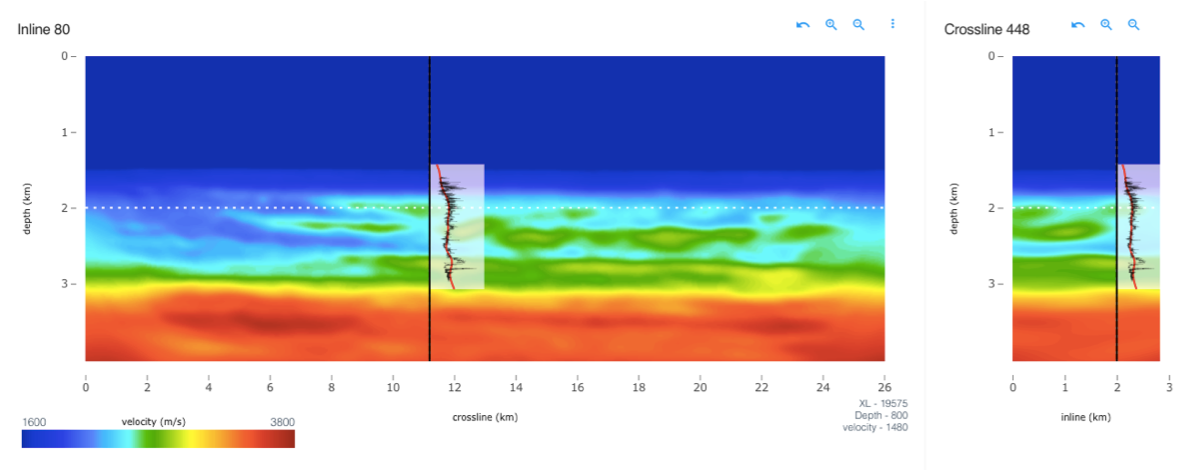
Firstly we show what happens when vanilla LS-FWI is applied to the data. The model ends up trapped in a local minimum of the cost function, misaligning with an intersecting sonic log shown in black - direct point measurements taken from within the drilled wellbore, and held completely unseen to the inversion.
Start
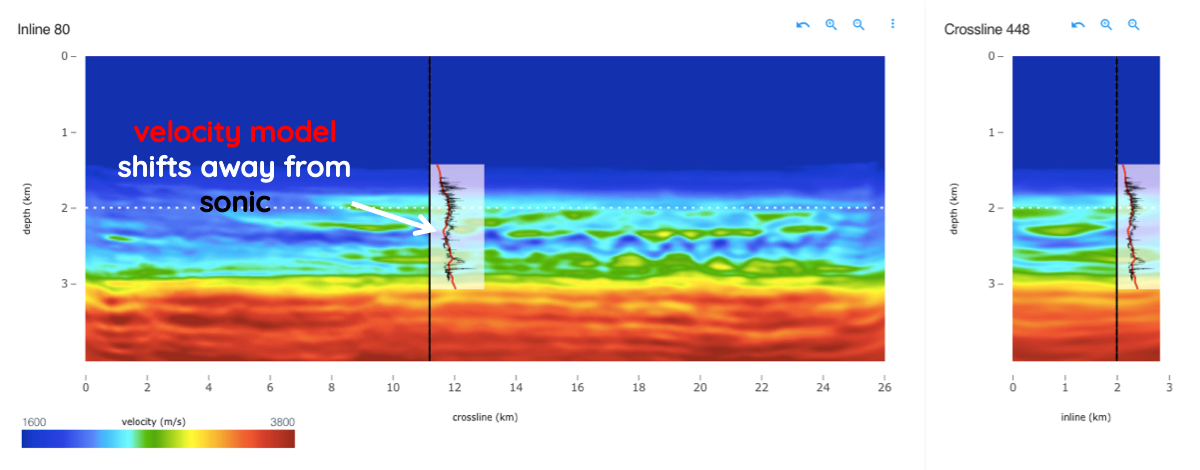
LS-FWI
Iterate Towards the Global Minimum Solution
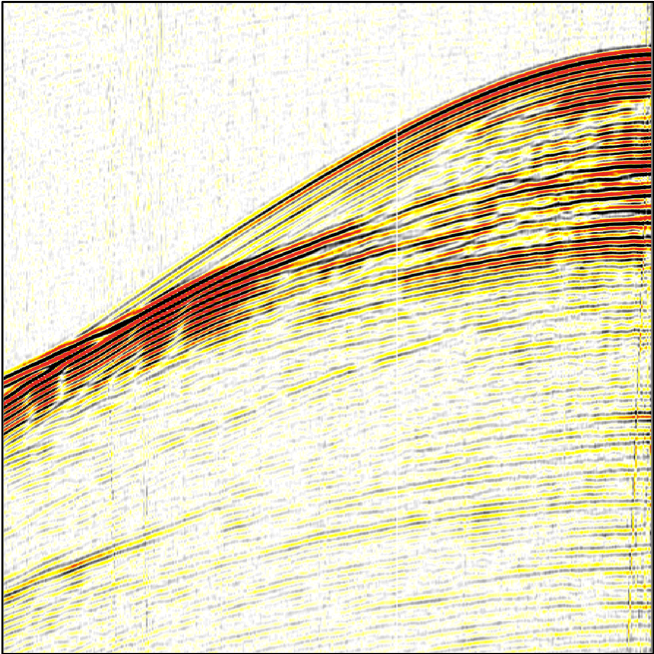
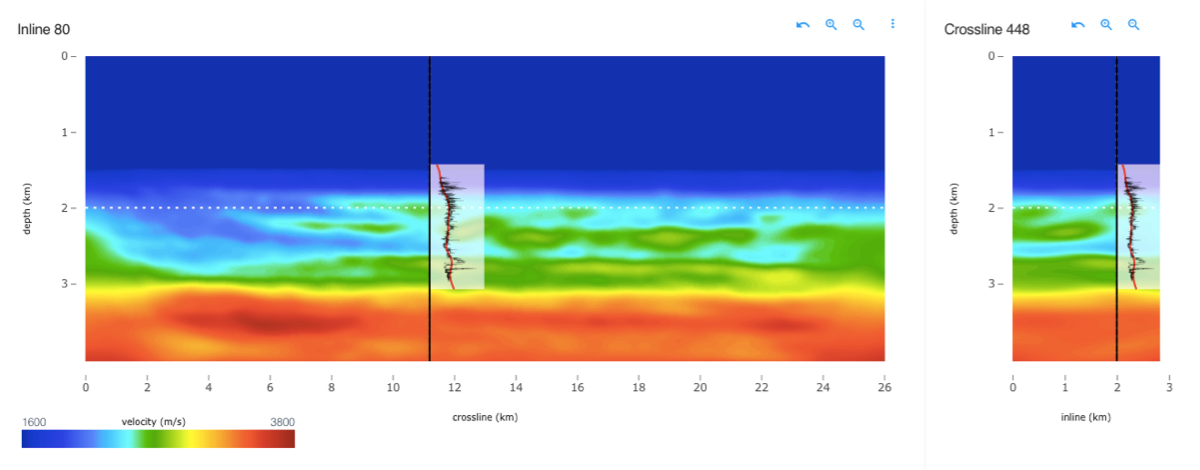
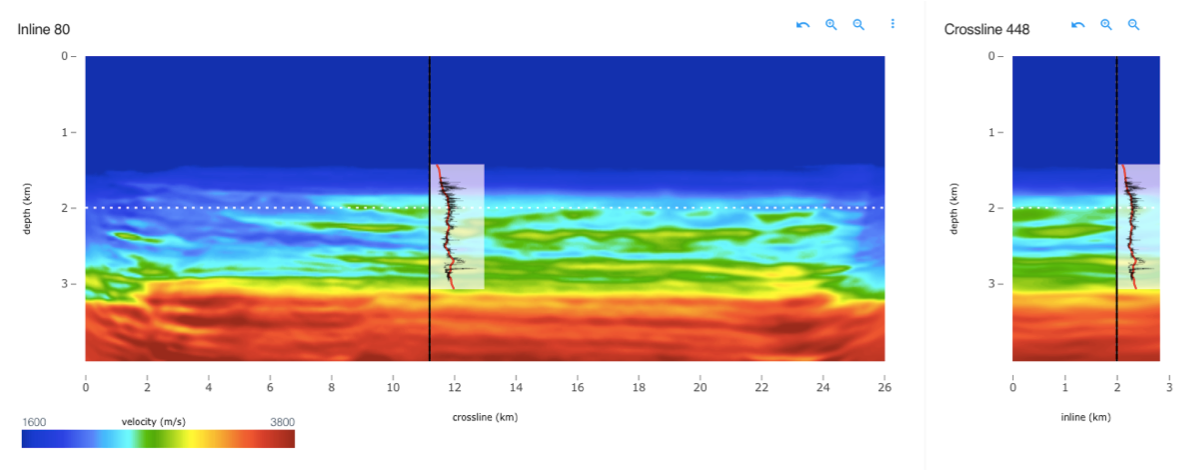
Instead using X-Wave with advanced cost functions on the same data from multiple different starting points gives the global minimum solution. This predicts the major trends and deviations in the log all the way down to the target depth, keeping the well blind as before.
In particular, the run uses a cost function which (1) penalises filter coefficients away from zero lag - known as adaptive waveform inversion and (2) defines the scattered wavefield with which to compute the macro model gradient - known as reflection waveform inversion.
Scenario I
Scenario II
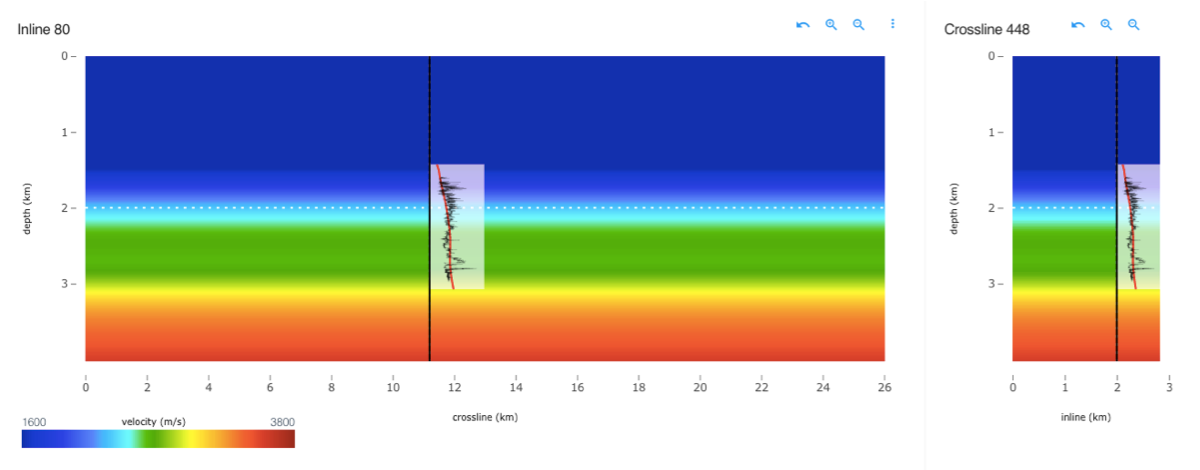
Start I
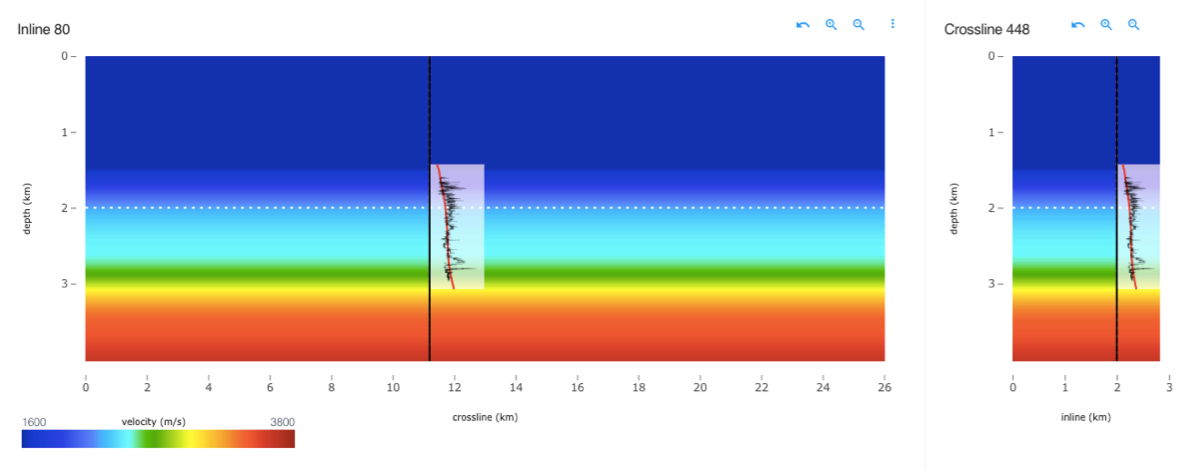
Start II
RWI+AWI
RWI+AWI
Final
Frequency Sweep
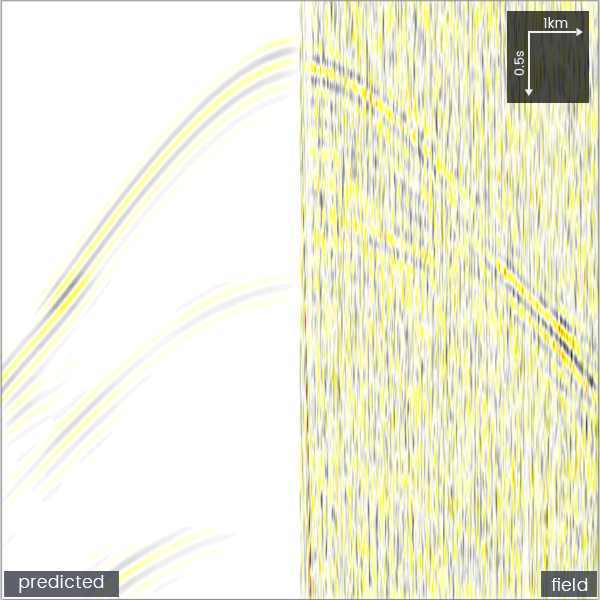
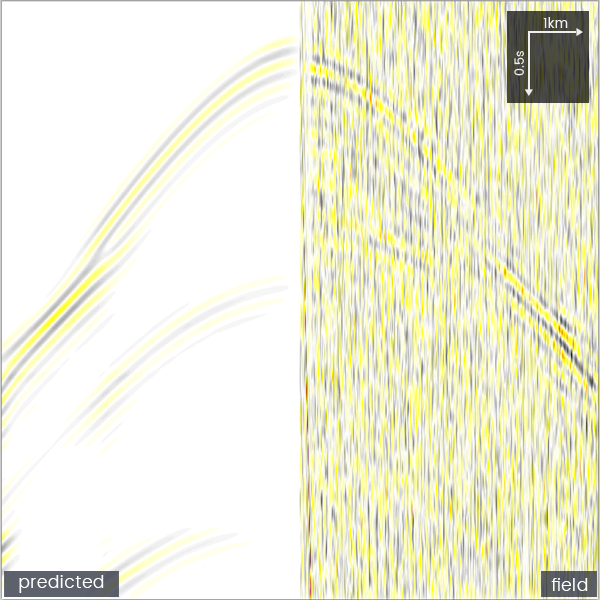
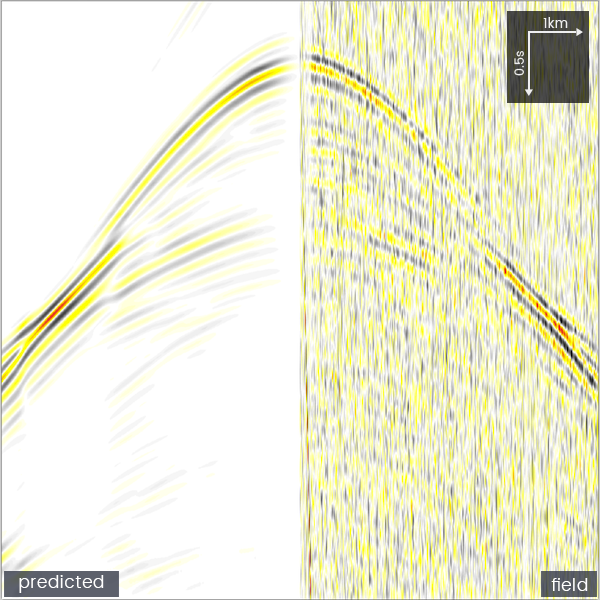
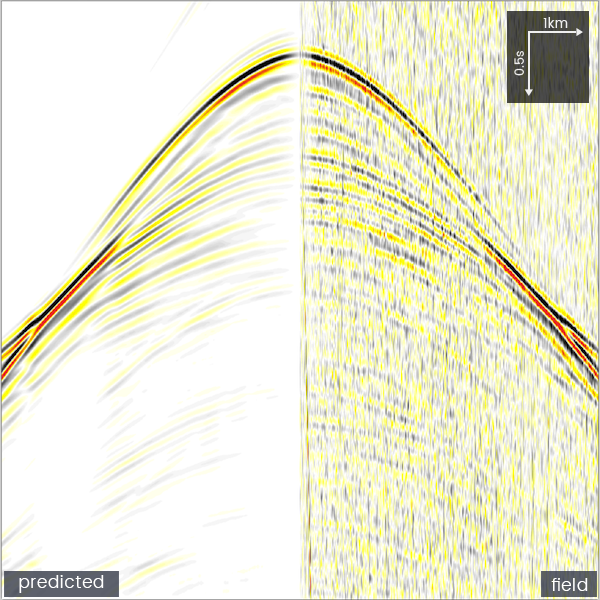
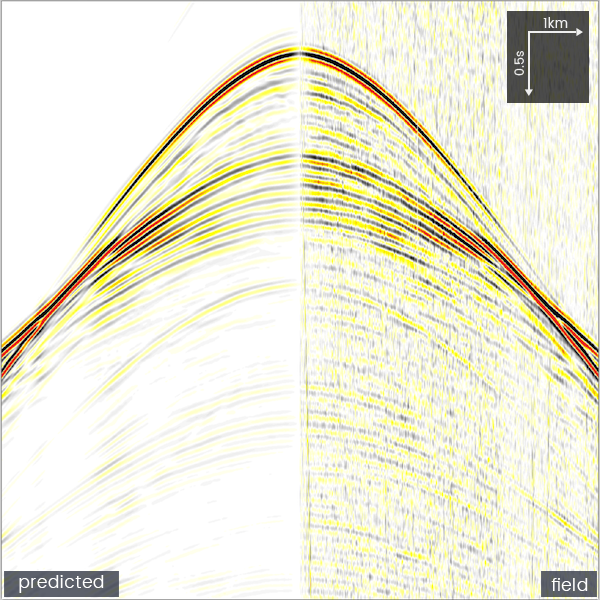
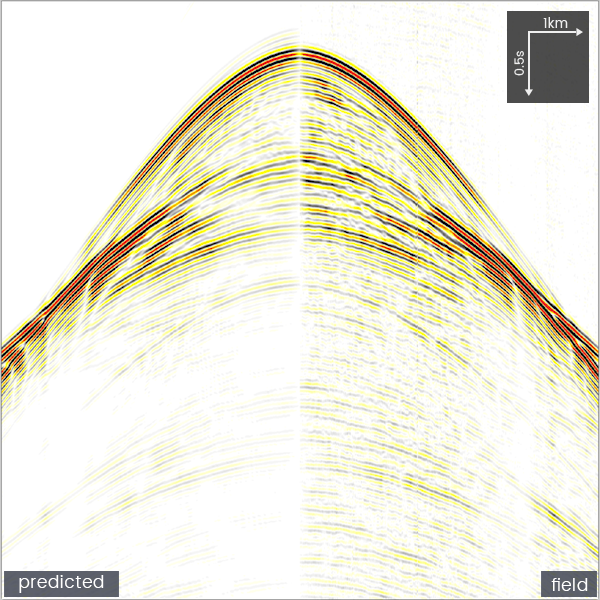
The panels show 6 stages of the inversion - predicted traces (left) and field recordings they are being matched against (right). The field recordings are being fed in at widening bandwidths with the lowest frequencies having lowest signal to noise. The initial match is very poor and the trace fit accuracy increases as the iterations proceed and bandwidth is widened, resulting in a convergence between the prediction and field recorded traces.
Harnessing the deepest and most-subtle data residual to drive global minimum convergence.
Start
4Hz
5Hz
7Hz
11Hz
22Hz
Differentiated capability
The comparison demonstrates the importance of the core algorithm. With XWI advanced cost functions, the target layer can be defined with precision. Using industry standard FWI, a misrepresentation of the subsurface is obtained with an erroneous low velocity band seen to cut across model.
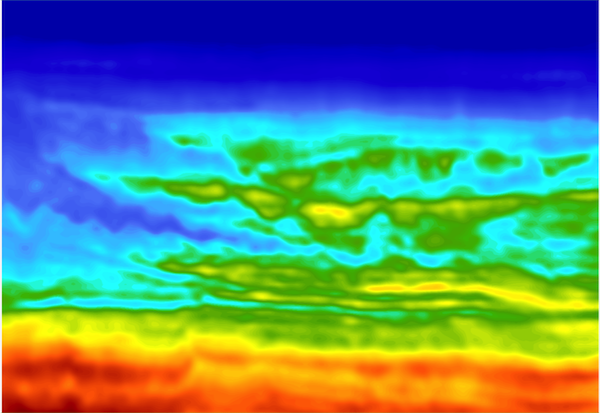
AWI+RWI
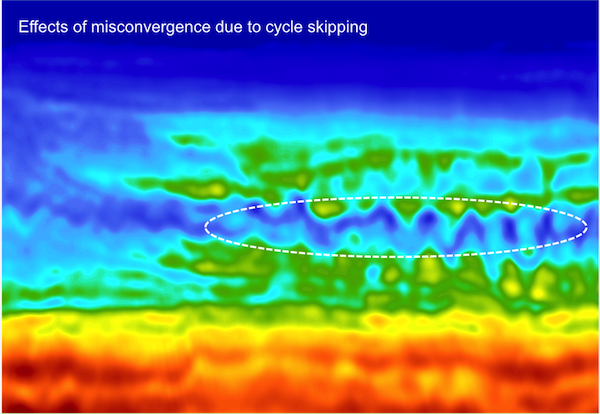
LS-FWI alone